Не обязательно покупать беспилотник в магазине — теперь вы можете сделать квадрокоптер на базе arduino самостоятельно. Дрон будет иметь мощное автономное питание и функционировать на стабилизационный системе, основой которой будет база Arduino. Если сделать летательный аппарат своими руками, можно сэкономить приличную сумму. Покупной коптер стоит минимум 80 долларов. Если вы создадите его самостоятельно, это обойдется примерно в 60 условных единиц.

Самодельный квадрокоптер — предмет отдельного разговора. Всегда были, есть и будут пользователи, которым мало просто летать. Им необходимо почувствовать себя великими конструкторами и быть уверенными, что дрон, сделанный собственноручно, будет летать так, как хочется именно им.
Летающую модель с 4 ножками можно сотворить своими руками. Процесс не покажется вам сложным, а наоборот, доставит удовольствие, но только при условии изучения инструкции и пошагового ее соблюдения. Прежде всего, перед процессом создания дрона, стоит определиться с элементами, которые будут использованы в работе. В качестве контролера, как и предполагалось, будем использовать платформу Arduino — это недорогая, но качественная база, которая обеспечит устройству бесперебойную работу.
Для создания беспилотника важно правильно подобрать двигатели. Бесщеточные достаточно мощные, но их стоимость составляет минимум 20 долларов, это означает, что устройство обойдется около 80 долларов. В данном случае стоит отдать предпочтение щеточному варианту — намного дешевле, и не требуют установки дополнительных контроллеров.
Так же необходимо позаботиться о приобретении качественного мотора, а затем заняться его стабилизацией. Здесь не обойтись без акселерометра и гироскопа. Так определим угол наклона и ускорение. Данные сенсоры — для создания мощной модели. Чтобы сделать квадрокоптер своими руками с управлением Arduino, вам понадобятся:
- аккумуляторы на 3,7 В литиевого типа;
- провода;
- транзистор не слабее ULN2003A Darlington Transistor;
- моторы Coreless Motors;
- микроконтроллер 0820 Coreless Motors;
- гироскоп;
- акселерометр;
- инструменты для спаивания;
- 3D принтер.
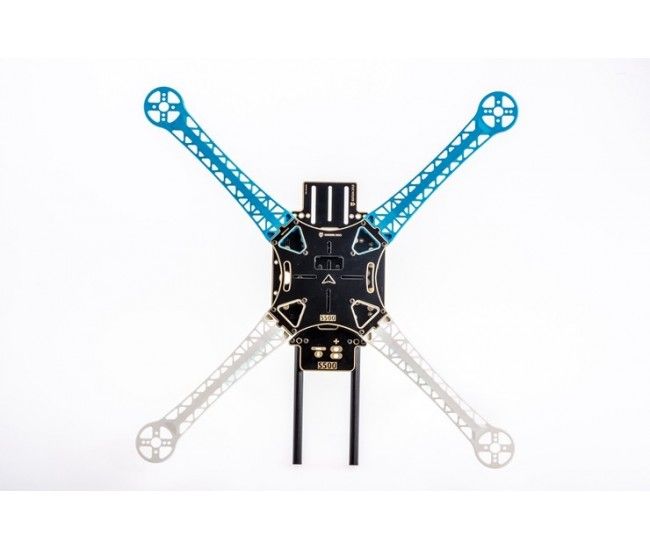
Первое, что следует сделать – это создать раму для будущего квадрокоптера. Каркас получится легким и прочным, если воспользоваться 3D принтером. Затем следует настроить акселерометр и гироскоп. Не нужно подключать к 5 В — это может привести к тому, что плата испортится. Лучше отдать предпочтение 3.3 В. Необходимо учесть, что в большинстве плат есть специальный регулятор напряжения.

После подключения акселерометра можно начать сборку электросхемы. Чтобы сделать все правильно, стоит просмотреть подробное видео, где доступно разъясняют способы сборки. Теперь у вас есть свой квадрокоптер, который вы сделали под нашим четким руководством.
Как оказалось – это вполне реальная задача. Процесс не доставит вам забот, зато можно сэкономить большую сумму. Если возникли сомнения по поводу запуска вашего устройства, инструкцию о том как это сделать читайте здесь. При правильном обращении квадрокоптер на базе arduino прослужит долго.